
16/05/2022
Door Ad Spijkers
Bin picking met robots gaat nog te vaak mis. Fraunhofer IPA werkt samen met partners aan een oplossing.
In het onderzoeksproject FabOS werkt het Fraunhofer-Institut für Produktionstechnik und Automatisierung (IPA) in Stuttgart samen met partners om onder meer een bin-picking-applicatie te ontwikkelen. Hiermee moeten op een gedefinieerde manier plaatwerkdelen kunnen worden herkend, opgepakt en neergelegd. Dit onderzoeksproject heeft tot doel een open, gedistribueerd, voor real-time geschikt en veilig besturingssysteem voor productie te creëren.
Bin picking
Bin-picking wordt beschouwd als de hoogste discipline van robotica en is een populaire optie in veel producties. De uitdagingen zijn echter groot, waardoor de applicatie vaak niet wordt geïmplementeerd. Hiervoor zijn twee redenen.
Cellen met handle-in-the-box zijn de eerste schakel in een gekoppelde productie- of assemblagelijn en moeten dus zorgen voor een gegarandeerde cyclus. Vaak herkent het robotsysteem echter niet alle onderdelen, waardoor medewerkers de restanten met de hand moeten verwijderen. Dat brengt de lijn uit de pas. Verder duurt het vaak langer voordat het robotsysteem deze verwijdert. De fluctuaties in de cyclustijd kunnen worden gecompenseerd met een worst case ontwerp of met een buffer. Geen van beide is ideaal.
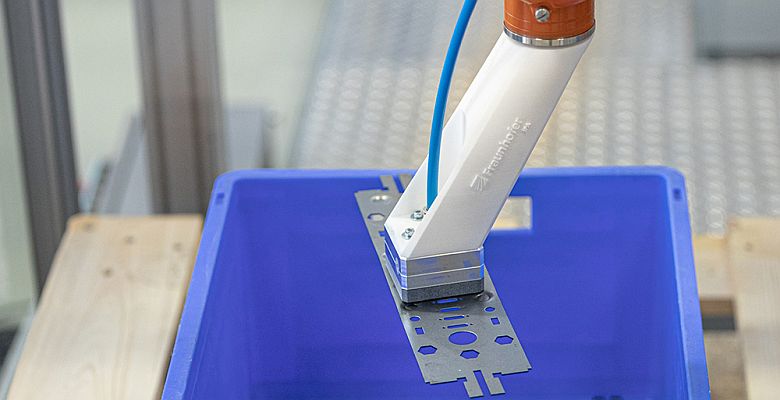
Om deze problemen op te lossen, ontwikkelt Fraunhofer IPA al jaren bin-picking-technologieën. De onderzoekers zijn vooral geïnteresseerd in oplossingen voor de beeldverwerking van voor het robotsysteem moeilijk te herkennen componenten. De nieuw gecreëerde demonstrator implementeert de pick-in-the-box-toepassing met plaatwerkdelen. De applicatie is gedefinieerd met de praktijkpartner in het project, Trumpf, dat ook de componenten levert. Het instituut ontwikkelt de applicatie samen met AI-specialist Compaile uit Karlsruhe.
Plaatwerkdelen
De ontwikkelaars moeten hun algoritmen voor beeldverwerking aanpassen aan de uitdagingen van de herkenning van plaatwerkonderdelen. Hiervoor gebruiken ze de bestaande software BP3, die al in een aantal producties in drieploegendienst wordt gebruikt en die de bedrijven via een licentie kunnen verwerven.
Om de vlakke plaatdelen duidelijk te kunnen identificeren, worden eerst met behulp van camera's 3D-gegevens van de componenten gegenereerd. De algoritmen richten zich vervolgens op oppervlakken en randen om de componenten beter te herkennen en in het algemeen robuuster en sneller te kunnen hanteren. Hieronder valt ook een gedefinieerde plaatsing, zodat het onderdeel direct naar de volgende processtap kan worden gevoerd.
In de toekomst is het de bedoeling om methoden uit de kunstmatige intelligentie te gebruiken om continu leren mogelijk te maken. Dit betekent dat de software bijvoorbeeld leert van fouten. Als er meerdere 'grab in the box' cellen zijn, kunnen de gegevens van alle cellen centraal worden verwerkt en de bevindingen worden teruggekoppeld naar de cellen. Het is ook de bedoeling om het robotsysteem te trainen voor het grijpen met behulp van componentgegevens in een simulatieomgeving.
Correct toewijzen
Compaile vult de applicatie aan met op AI gebaseerde componentherkenning. Dit is niet gebaseerd op klassieke beeldverwerking, maar op een inhoudelijke gelijkvormigheidsvergelijking van de component. Op basis van neurale netwerken kan het onderdeel worden toegewezen aan beschikbare productieplannen.
Daarnaast geven de neurale netwerken aan hoe groot de kans is dat hun informatie klopt. Op deze manier kan het systeem zich volledig automatisch aanpassen aan het huidige onderdeel zonder dat een specialist dit onderdeel hoeft te specificeren. In tegenstelling tot de gebruikelijke classificatie met neurale netwerken, vereist de vergelijking van inhoudsovereenkomsten geen aanpassingen voor nieuwe, voorheen onbekende componenten.
Foto: Fraunhofer IPA