
16/12/2021
Door Ad Spijkers
Een nieuwe fabricagetechniek zorgt voor kunstmatige spieren die de prestaties van vliegende microrobots verbeteren.
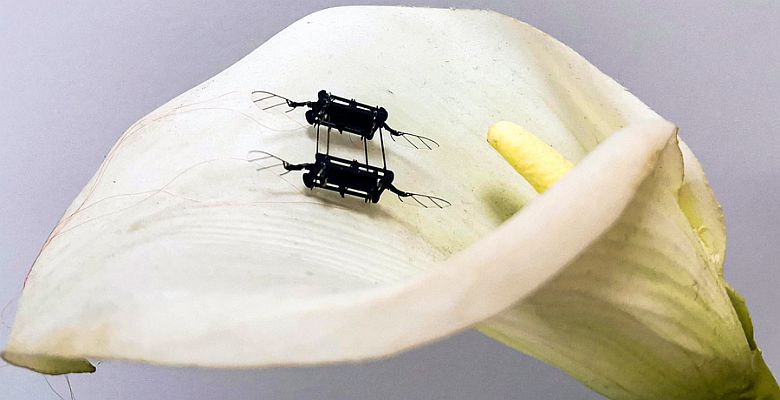
Er komt een dag dat een zwerm robots ter grootte van een insect een veld met gewassen kan bestuiven of op zoek gaan naar overlevenden tussen het puin van een ingestort gebouw. Onderzoekers aan het Massachusetts Institute of Technology hebben kleine drones ontwikkeld die deze taken uiteindelijk zouden kunnen uitvoeren.
Nieuwe fabricagetechniek
De zachte actuatoren die deze microrobots voortstuwen zijn duurzaam, maar vereisen hogere spanningen dan starre actuators van vergelijkbare grootte. De vederlichte robots kunnen niet de benodigde vermogenselektronica dragen waarmee ze zelfstandig zouden kunnen vliegen.
De onderzoekers hebben een fabricagetechniek ontwikkeld waarmee ze zachte actuatoren kunnen bouwen die werken met een 75% lagere spanning dan de huidige versies, terwijl ze 80% meer kunnen dragen. Deze zachte actuatoren zijn als kunstmatige spieren die snel met de vleugels van de robot klappen. De nieuwe fabricagetechniek produceert kunstmatige spieren met minder defecten, wat de levensduur van de componenten verlengt en de prestaties en het laadvermogen van de robot verhoogt.
Spieren maken
De rechthoekige microrobot heeft vier sets vleugels die elk worden aangedreven door een zachte actuator. Deze is gemaakt van lagen elastomeer die tussen twee dunne elektroden zijn ingeklemd en vervolgens in een zachte cilinder worden gerold. Wanneer er spanning op de actuator wordt toegepast, knijpen de elektroden in het elastomeer en die mechanische spanning wordt gebruikt om met de vleugel te klapperen.
Hoe meer oppervlakte de actuator heeft, des te minder spanning nodig is. De onderzoekers bouwen de kunstmatige spieren door zoveel mogelijk ultradunne lagen elastomeer en elektrode af te wisselen als ze kunnen. Maar naarmate elastomeerlagen dunner worden, worden ze onstabieler. Ze kunnen nu een actuator maken met twintig lagen van die elk 10 µm dik. Maar ze moesten delen van het fabricageproces opnieuw uitvinden om daar te komen. Uiteindelijk losten ze het ene fabricageprobleem na het andere op
Prestaties
Nadat ze er in slaagden om een kunstmatige spier van twintig lagen te creëren, testten ze deze tegen hun vorige zeslaagse versie en ultramoderne, stijve actuatoren. Tijdens lanceringsexperimenten oefende de nieuwe actuator voldoende kracht uit om de robot een draagkracht/gewicht-verhouding van 3,7 tot 1 te geven, zodat hij items kon dragen die bijna drie keer zo zwaar zijn .
Ze demonstreerden ook een zweefvlucht van twintig seconden, volgens de onderzoekers de langste vlucht die ooit door een robot van minder dan een gram is gemaakt. De zwevende robot hield zijn positie ook stabieler vast dan andere. De nieuwe actuator werkte na meer dan twee miljoen cycli nog steeds soepel, veel meer dan de levensduur van andere actuatoren.
Maar er is nog steeds een aantal fabricageprocessen in de materiaalwetenschap die wetenschappers niet begrijpen. Verder hopen ze de dikte te verminderen tot slechts 1 µm, wat de deur zou openen naar vele toepassingen voor deze robots ter grootte van een insect.
Foto: MIT