
25/03/2024
Door Ad Spijkers
Amerikaanse onderzoekers hebben een actuator ontworpen die dynamische taken kan uitvoeren met een fractie van de energie die voorheen nodig was.
Machines en daarmee hun componenten moeten steeds complexere, dynamische taken uit te voeren. Dat geldt ook voor de aandrijving van protheses die iemand te helpen die een ledemaat heeft verloren. Het geldt ook voor een autonome robot die door de buitenwereld navigeert: Maar de standaard elektromotor is ontworpen voor stabiele, voortdurende activiteiten zoals het laten draaien van een compressor of een transportband. Maar ook vernieuwde ontwerpen verspillen veel energie bij het maken van ingewikkeldere bewegingen.
Alternatief
Onderzoekers van Stanford University in de gelijknamige stad, 50 km ten zuiden van San Fransisco, hebben een manier bedacht om elektromotoren uit te breiden. Hiermee worden ze veel efficiënter in het uitvoeren van dynamische bewegingen. Ze ontwikkelden een nieuw type actuator die energie gebruikt om dingen te laten bewegen. Hun actuator maakt gebruik van veren en koppelingen om een verscheidenheid aan taken uit te voeren met een fractie van het energieverbruik van een typische elektromotor.
De actuator gebruikt de koppelingen om de hoge efficiëntieniveaus te bereiken die worden gerealiseerd bij elektromotoren in continue processen. Dit gebeurt zonder concessies te doen aan de bestuurbaarheid en andere functies die elektromotoren aantrekkelijk maken.
In actie komen
De actuator maakt gebruik van het vermogen van veren om kracht te produceren zonder energie te gebruiken. Veren houden niet van rek of indrukking en proberen terug te keren naar hun natuurlijke lengte wanneer ze worden losgelaten. Wanneer de nieuwe actuator bijvoorbeeld iets zwaars laat zakken, kunnen de onderzoekers de veren inschakelen zodat ze uitrekken, waardoor een deel van de belasting van de motor wordt afgenomen. Door de veren vervolgens in uitgestrekte positie te vergrendelen, kan die energie worden opgeslagen om de motor later bij een andere taak te helpen.
De sleutel tot het snel en efficiënt in- en uitschakelen van de veren is een reeks elektro-adhesieve koppelingen. Elke rubberen veer zit ingeklemd tussen twee koppelingen: een die de veer met het gewricht verbindt om de motor te ondersteunen en een die de veer in een uitgerekte positie vergrendelt wanneer deze niet wordt gebruikt.
De koppelingen bestaan uit twee elektroden die soepel langs elkaar glijden als ze niet actief zijn. Eén elektrode is bevestigd aan de veer en één aan het frame of de motor. Om een koppeling in werking te stellen, leggen de onderzoekers een grote spanning aan op een van de elektroden. De elektroden worden met een hoorbare klik naar elkaar toe getrokken. Het werkt als een snelle, sterke versie van statische elektriciteit. Het loslaten van de veer is net zo eenvoudig als het aarden van de elektrode en het terugbrengen van de spanning naar nul.
Eigenschappen
De actuatoren hebben een lage massa en zijn klein, gaan zuinig om met energie en kunnen snel worden in- en uitgeschakeld. Veel gekoppelde veren openen veel mogelijkheden hoe gebruiker ze kan configureren en besturen om interessante resultaten te bereiken.
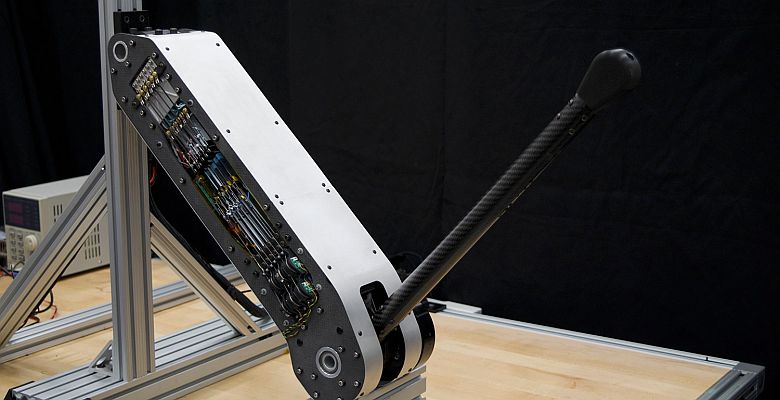
De op Stanford gebouwde actuator heeft een motor die is aangevuld met zes identieke koppelingsveren, die in elke combinatie kunnen worden ingeschakeld. De onderzoekers hebben het ontwerp aan een reeks bewegingstests onderworpen, waaronder snelle acceleratie, wisselende belastingen en soepele, stabiele bewegingen. Bij elke taak gebruikte de versterkte motor minstens 50% minder stroom dan een standaard elektromotor. In het beste geval verminderde het energieverbruik zelfs met 97%.
Momenteel duurt het een paar minuten voordat de controller van de actuator de meest efficiënte manier heeft berekend om de combinatie van veren te gebruiken om een nieuwe taak te volbrengen. De onderzoekers hebben plannen om dat tijdsbestek aanzienlijk te verkorten. Ze stellen zich een systeem voor dat kan leren van eerdere taken, waardoor een groeiende database van steeds efficiëntere bewegingen ontstaat en kunstmatige intelligentie wordt gebruikt om intuïtief te begrijpen hoe iets nieuws effectief kan worden bereikt.
De toekomst
Met aanzienlijk efficiëntere motoren zouden robots meer kunnen bereiken. Een robot die een hele dag kan draaien, in plaats van slechts één uur of twee voordat hij moet opladen, heeft het potentieel om veel betekenisvollere taken uit te voeren. Er zijn tal van onveilige situaties – waarbij sprake is van giftige materialen, gevaarlijke omgevingen of andere gevaren – waar gebruikers veel liever een robot sturen dan iemand in gevaar brengen.
De ontwikkeling heeft ook gevolgen voor hulpmiddelen zoals protheses of exoskeletten. Als de gebruiker die niet voortdurend hoeft op te laden, kunnen deze hulpmiddelen een grotere impact hebben op de mensen die ze gebruiken.
De onderzoekers zouden een aantal kleine controle- en ontwerpaanpassingen willen doorvoeren. Maar ze denken dat de technologie op een punt staat waar deze klaar is voor commerciële vertaling. Ze denken er aan de actuator uit het laboratorium te halen en een bedrijf te starten dat deze actuatoren gaat maken voor de robots van de toekomst.
De video geeft uitleg over de werking van de aandrijving. De geluidskwaliteit is helaas niet best, maar er is ondertiteling. De wetenschappelijke publicatie vindt u hier.
Foto: Erez Krimsky