
30/05/2022
Door Ad Spijkers
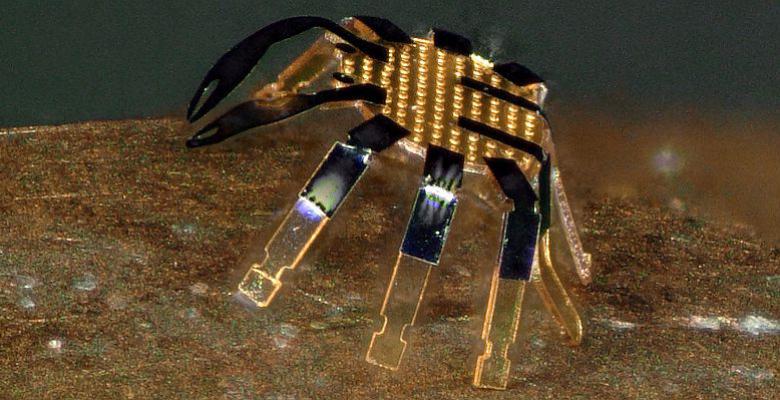
De robot is kleiner dan een vlo en kan lopen, buigen, draaien, draaien en springen.
Ingenieurs van de Northwestern University in Evanston (Illinois) hebben de kleinste op afstand bestuurbare looprobot ooit ontwikkeld. Hij heeft de vorm van een kleine Atlantische rotskrab. De robotkrabben zijn slechts 0,5 mm (!) breed en kunnen buigen, draaien, kruipen, lopen, draaien en zelfs springen. De onderzoekers ontwikkelden ook robots van enkele millimeters die lijken op rupsen, krekels en kevers.
Microrobots
Het onderzoek bevindt zich nog in een verkennende fase. Maar de onderzoekers denken dat de technologie bij het realiseren van microrobots kan brengen die praktische taken kunnen uitvoeren in krappe ruimtes. De ontwikkeling van dergelijke robots is volgens de onderzoekers een leuk onderwerp voor academische verkenning.
Microrobots kunt u zich voorstellen als agenten om kleine constructies of machines in de industrie te repareren of te assembleren. Ook zijn ze denkbaar als chirurgische hulpmiddelen om verstopte slagaders te verwijderen, interne bloedingen te stoppen of kankertumoren te elimineren. Dat kan dan gebeuren in minimaal invasieve procedures.
De technologie maakt een verscheidenheid aan gecontroleerde bewegingsmodaliteiten mogelijk. Het robotje kan lopen met een gemiddelde snelheid van de helft van zijn lichaamslengte per seconde. En het is een hele uitdaging om dat op zulke kleine schaal te bereiken voor robots.
Techniek
De krab is kleiner dan een vlo en wordt de krab niet voortbewogen door complexe hardware, hydrauliek of elektriciteit. In plaats daarvan ligt zijn kracht in de elastische veerkracht van zijn lichaam. Om de robot te bouwen, gebruikten de onderzoekers een legeringsmateriaal met vormgeheugen dat bij verhitting verandert in zijn 'herinnerde' vorm. In dit geval gebruikten de onderzoekers een gescande laserstraal om de robot snel op verschillende gerichte locaties over zijn lichaam te verwarmen.
Een dunne laag glas brengt dat overeenkomstige deel van de structuur bij afkoeling elastisch terug in zijn oorspronkelijke vorm. Omdat deze structuren zo klein zijn, gaat de afkoeling erg snel. Door de afmetingen van de robots te verkleinen, kunnen ze sneller rennen.
Doordat de robot van de ene fase naar de andere verandert, creëert hij voortbeweging. Niet alleen bedient de laser de robot op afstand om hem te activeren, de instraalrichting bepaalt ook de looprichting van de robot. Door bijvoorbeeld van links naar rechts te scannen, beweegt de robot van rechts naar links.
Vormgeving
Om zo'n klein beestje te maken, wendden de onderzoekers zich tot een techniek die ze acht jaar geleden introduceerden - een pop-up montagemethode. Eerst fabriceerden ze voorlopers van de wandelende krabstructuren in platte, vlakke geometrieën. Vervolgens bonden ze deze voorlopers op een enigszins uitgerekte rubberen ondergrond. Wanneer het uitgerekte substraat wordt ontspannen, vindt een gecontroleerd knikproces plaats waardoor de krab 'opduikt' in nauwkeurig gedefinieerde driedimensionale vormen.
Met deze productiemethode kon het onderzoeksteam robots in verschillende soorten en maten ontwikkelen. Met deze assemblagetechnieken en materiaalconcepten kunnen de onderzoekers lopende robots bouwen met bijna alle maten of 3D-vormen. Maar ze voelden zich geïnspireerd en geamuseerd door de zijwaarts kruipende bewegingen van kleine krabben. Een creatieve bevlieging dus.
Foto: Northwestern University