
02/05/2024
Door Ad Spijkers
Een vierpotige robot van EPFL is met machine learning getraind om vallen te voorkomen door te schakelen tussen lopen, draven en pronken.
Onderzoekers van de École Polytechnique Fédérale de Lausanne (EPFL) hebben een vierpotige robot getraind met machine learning om vallen te voorkomen. Dat doet hij door spontaan te schakelen tussen lopen, draven en pronken (met vier poten recht omhoog springen door springbokken en gazellen). De onderzoekers spreken van een mijlpaal voor zowel robotici als biologen die geïnteresseerd zijn in de voortbeweging van dieren.
Voortbeweging
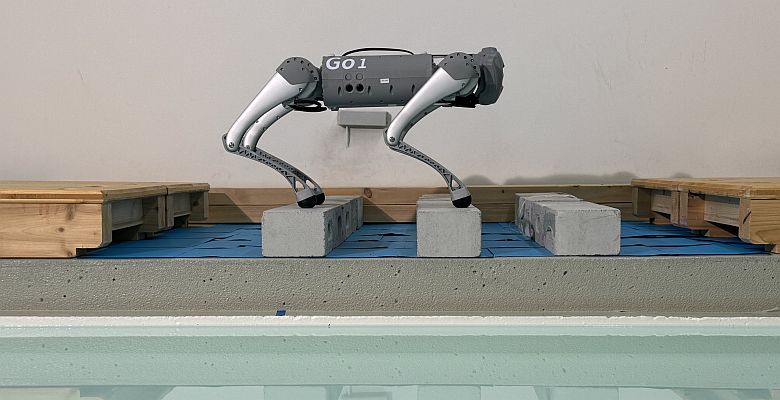
Met behulp van Deep Reinforcement Learning (DRL), een vorm van machine learning, leerde de EPFL-robot met name de overgang van draven naar pronken. Hierdoor kan de robot navigeren door uitdagend terrein met gaten variërend van 14 cm tot 30 cm. De studie biedt nieuwe inzichten in waarom en hoe dergelijke gangovergangen bij dieren plaatsvinden.
Eerder onderzoek heeft energie-efficiëntie en het vermijden van letsels aan het bewegingsapparaat genoemd als de twee belangrijkste verklaringen voor loopovergangen. Meer recentelijk hebben biologen betoogd dat stabiliteit op vlak terrein belangrijker zou kunnen zijn. Maar dier- en robotexperimenten hebben aangetoond dat deze hypothesen niet altijd geldig zijn, vooral niet op oneffen terrein.
De onderzoekers waren daarom geïnteresseerd in een nieuwe hypothese over waarom loopovergangen optreden: levensvatbaarheid of het voorkomen van vallen. Om deze hypothese te testen, gebruikten ze DRL om een viervoetige robot te trainen om verschillende terreinen te doorkruisen.
Experimenten
Op vlak terrein ontdekten ze dat verschillende gangen verschillende niveaus van robuustheid vertoonden tegen willekeurige duwen. De robot schakelde op zo'n moment over van stappen naar draf, net zoals viervoeters doen wanneer ze versnellen. Toen hij werd geconfronteerd met opeenvolgende gaten in het experimentele oppervlak, schakelde de robot spontaan over van draven naar pronken om vallen te voorkomen. Bovendien was de levensvatbaarheid de enige factor die door dergelijke loopovergangen werd verbeterd.
De onderzoekers hebben laten zien dat de levensvatbaarheid op vlak terrein en uitdagend afzonderlijk terrein leidt tot het ontstaan van loopovergangen. De energie-efficiëntie wordt er niet noodzakelijkerwijs door verbeterd. Het lijkt erop dat energie-efficiëntie een groter gevolg zou kunnen zijn. Wanneer een dier door uitdagend terrein navigeert, is de kans groot dat zijn eerste prioriteit niet ten koste gaat van energie-efficiëntie.
Leerarchitectuur
Om de bewegingscontrole in hun robot te modelleren, hebben de onderzoekers rekening gehouden met de drie op elkaar inwerkende elementen die de beweging van dieren aansturen: de hersenen, het ruggenmerg en sensorische feedback van het lichaam. Ze gebruikten DRL om een neuraal netwerk te trainen om de overdracht van hersensignalen door het ruggenmerg naar het lichaam te imiteren terwijl de robot een experimenteel terrein doorkruiste.
Vervolgens kende het team verschillende gewichten toe aan drie mogelijke leerdoelen: energie-efficiëntie, krachtvermindering en levensvatbaarheid. Uit een reeks computersimulaties bleek dat van deze drie doelen levensvatbaarheid de enige was dat de robot ertoe aanzette automatisch – zonder instructies van de wetenschappers – zijn gang te veranderen.
Het team benadrukt dat deze observaties het eerste op leren gebaseerde voortbewegingsraamwerk vertegenwoordigen waarin loopovergangen spontaan ontstaan tijdens het leerproces. De bio-geïnspireerde leerarchitectuur demonstreerde state-of-the-art viervoetige robotbehendigheid op het uitdagende terrein.
De onderzoekers willen aanvullende experimenten uitvoeren waarbij verschillende soorten robots in een grotere verscheidenheid aan uitdagende omgevingen worden geplaatst. Behalve verdere opheldering van de voortbeweging van dieren hopen ze dat hun werk uiteindelijk het bredere gebruik van robots voor biologisch onderzoek mogelijk zal maken. Hierdoor zal de afhankelijkheid van diermodellen en de daarmee samenhangende ethische zorgen worden verminderd.
De wetenschappelijke publicatie vindt u hier.
Foto: EPFL