
09/02/2021
Door Ad Spijkers
Onderzoeksinstituut Geomar Helmholtz-Zentrum für Ozeanforschung Kiel en Fachhochschule Kiel ontwikkelen gezamenlijk een eigen onderwaterrobot voor onderzoek op zee.
Poseidon is een naam met een rijke traditie voor marien onderzoek in Kiel. Reeds in 1902 werd het eerste onderzoeksschip, de Reichsforschungsdampfer Poseidon, die tot 1938 voor onderzoek op zee werd gebruikt. In 1976 werd de tweede Poseidon overgedragen aan het toenmalige Institut für Meereskunde, een van de voorlopers van het huidige Geomar. Het zeegaande onderzoeksschip deed meer dan veertig jaar dienst en werd eind 2019 uit de vaart genomen en verkocht.
De deelstaat Schleswig-Holstein stelt de opbrengst van de verkoop van het onderzoeksschip ter beschikking aan het Geomar Helmholtz-Zentrum für Ozeanforschung Kiel. Met de opbrengst zal het onderzoekscentrum in samenwerking met de Fachhochschule Kiel een nieuw autonoom onderwatervoertuig ontwikkelen (Autonomous UnderwaterVehicle of AUV), dat vervolgens op onderzoeksmissie zal gaan onder de naam Poseidon.
Eigen ontwikkeling
Tot dusver hebben de onderzoekers dergelijke onderwatervoertuigen rechtstreeks van de fabrikanten gekocht, of alleen subsystemen ontwikkeld en geïntegreerd. Nu willen ze de expertise die we tot nu toe hier in Kiel hebben opgedaan, uitbreiden en zelf zo'n voertuig ontwerpen. De afgelopen jaren heeft Geomar al samengewerkt met de Fachhochschule in kleinere aan AUV;s gerelateerde projecten en veel ervaring opgedaan door verschillende autonome vaartuigen te bedienen. Bovendien beschikt het technisch en logistiek centrum van het instituut over moderne werkplaatsen en nieuwe bedrijfsruimten direct aan de monding van de Schwentine om een dergelijk apparaat te bouwen.
Het bouwen van een eigen toestel zal uiteraard meer tijd in beslag nemen dan het kopen van een kant-en-klaar toestel op de markt. Maar de eigen ontwikkeling is niet alleen wetenschappelijk, maar ook economisch verantwoord, aangezien de besturingssoftware en een team met praktijkervaring reeds beschikbaar zijn. Dit betekent dat het project ook kan worden uitgevoerd met de door de staat verstrekte middelen.
Status van het project
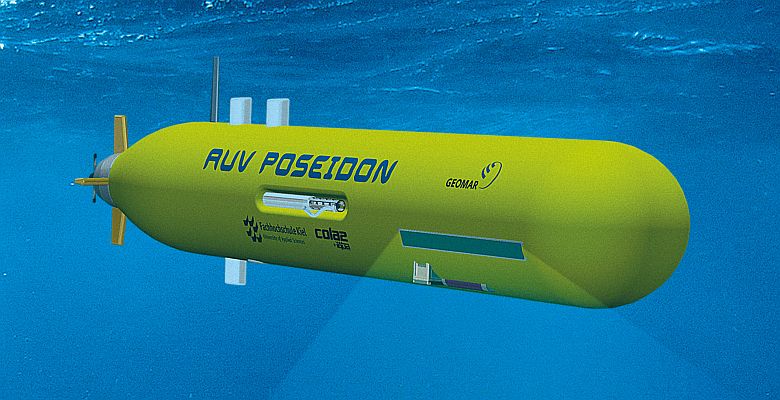
Het project bevindt zich momenteel in de vroege planningsfase, waarin de eerste kerngegevens zijn vastgesteld. De AUV Poseidon zal gedurende verscheidene uren autonoom tot een diepte van 6.000 m kunnen duiken en een verscheidenheid van gegevens kunnen verzamelen. Dit gebeurt naar analogie van de AUV Abyss (foto), die ook bij Geomar wordt geëxploiteerd. De Poseidon zal qua afmetingen vergelijkbaar zijn met de Abyss, maar zal worden voorzien van eigen software. In de AUV zullen diverse meetinstrumenten en sensoren worden geïntegreerd, zoals multibeam echosounders, side scan sonars, troebelheids- en fluorescentiesensoren en een instrument standaardwaarden meet zoals zoutgehalte, watertemperatuur en diepte.
Het streven is om de ontwerpfase medio 2021 af te ronden. Zodra de precieze plannen zijn vastgesteld, is het de bedoeling dat dit najaar met de uitvoering wordt begonnen. Geomar kan een dergelijk project niet alleen aan maar heeft in de Fachhochschule een competente partner aan zijn zijde. In het kader van projecten en masterscripties zullen beide partijen samen enkele componenten ontwikkelen. Er wordt onder meer samengewerkt op het gebied van mechanica, systeemintegratie en het vermijden van obstakels. UAV's zijn belangrijke instrumenten die nieuwe inzichten mogelijk maken in de nog grotendeels onontgonnen zeebodems in de diepzee.
Foto: J. Sprenger, C. Kersten, Geomar