
09/04/2024
Door Ad Spijkers
Modulaire, veer-achtige componenten maximaliseren het werk van levende spiervezels voor biohybride robotaandrijvingen.
Spieren zijn de perfecte actuatoren van de natuur: ze zetten energie om in beweging. Door hun grootte zijn spiervezels krachtiger en nauwkeuriger dan de meeste synthetische actuatoren. Ze kunnen zelfs genezen van schade en sterker worden door oefening.
Om deze redenen onderzoeken ingenieurs manieren om robots met natuurlijke spieren aan te drijven. Er is een handvol 'biohybride' robots gedemonstreerd die op spieren gebaseerde actuatoren gebruiken om kunstmatige skeletten aan te drijven. Deze kunnen lopen, zwemmen, pompen en grijpen. Maar voor elk bot is er een andere bouw nodig; er is geen algemene blauwdruk hoe het meeste uit spieren te halen voor een bepaald robotontwerp.
Nieuwe component
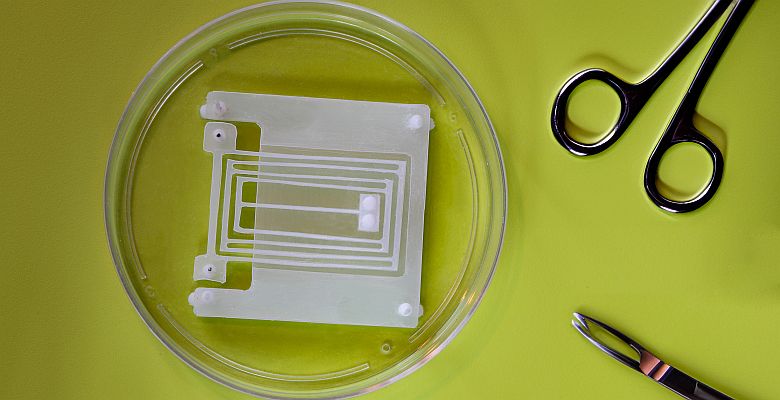
Wetenschappers aan het Massachusetts Institute of Technology hebben een veer-achtige component ontwikkeld dat kan worden gebruikt als een skeletachtige basismodule voor vrijwel elke spiergebonden bot. De nieuwe veer, of 'buiging', is ontworpen om het meeste uit het aangesloten spierweefsel te halen. De component maximaliseert de hoeveelheid beweging die een spier op natuurlijke wijze kan produceren.
De onderzoekers plaatsten een ring van spierweefsel op de component, vergelijkbaar met een rubberen band die rond twee stripjes is gespannen. Ze ontdekten dat de spier betrouwbaar en herhaaldelijk aan de veer trok en deze vijf keer meer uitrekte, vergeleken met andere eerdere ontwerpen.
Het ontwerp kan worden gecombineerd met andere buigingselementen om elke configuratie van kunstmatige skeletten te bouwen. Ingenieurs kunnen de skeletten vervolgens uitrusten met spierweefsel om hun bewegingen te versterken. Met hun ontwikkeling geven de onderzoekers robotici een nieuwe reeks tools om krachtige en nauwkeurige spieraangedreven robots te maken.
Spiertrekkingen
Wanneer het spierweefsel onder gunstige omstandigheden alleen wordt gelaten in een petrischaaltje, zal het spierweefsel vanzelf samentrekken. Maar dat gebeurt in richtingen die niet geheel voorspelbaar of van veel nut zijn. Als spieren nergens aan vastzitten, zullen ze veel bewegen, maar met een grote variabiliteit, waarbij ze alleen maar in de vloeistof bewegen.
Om een spier als een mechanische actuator te laten werken, bevestigen ingenieurs een band spierweefsel doorgaans tussen twee kleine, flexibele strippen. Terwijl de spierband op natuurlijke wijze samentrekt, kan deze de stripjes buigen en naar elkaar toe trekken. Aldus ontstaat een beweging die idealiter een deel van een robotskelet zou aandrijven.
Maar in deze ontwerpen hebben de spieren een beperkte beweging, vooral omdat de weefsels zo variabel zijn in de manier waarop ze contact maken met de stripjes. Afhankelijk van waar de spieren op de stripjes zijn geplaatst en hoeveel van het spieroppervlak de stripje raakt, kunnen de spieren de stripjes naar elkaar toe te trekken. Maar op andere momenten kunnen ze op oncontroleerbare manieren heen en weer wiebelen.
Één richting
De onderzoekers aan MIT wilden een skelet ontwerpen dat de samentrekkingen van een spier focust en maximaliseert, ongeacht waar en hoe deze precies op het skelet wordt geplaatst. Op deze manier wilden ze op een voorspelbare, betrouwbare manier de meeste beweging genereren. De vraag was hoe ze een skelet konden ontwerpen dat zo efficiënt mogelijk gebruik maakt van de kracht die de spier genereert.
De onderzoekers keken eerst naar de meerdere richtingen waarin een spier op natuurlijke wijze kan bewegen. Ze redeneerden dat, als een spier twee stripjes in een bepaalde richting naar elkaar toe moet trekken, de stripjes verbonden moeten worden met een veer. Hierdoor kunnen ze alleen in die richting bewegen als ze worden getrokken. Er was behoefte aan een component die in één richting zacht en flexibel is en stijf in alle andere richtingen. Wanneer een spier dan samentrekt, kan de kracht efficiënt wordt omgezet in beweging in één richting.
Soft flex
De onderzoekers vonden de oplossing bij het werktuigkundig laboratorium van MIT. Dit is gespecialiseerd in het ontwerp en de fabricage van machine-elementen zoals miniatuuractuatoren, lagers en andere mechanismen. Tot de nauwkeurig bewerkte elementen van de groep behoren veer-achtige apparaten, vaak gemaakt van parallelle stripjes, die met nanometerprecisie kunnen buigen en strekken. Afhankelijk van hoe dun en ver uit elkaar de stripjes zijn, is de stijfheid van de veer in te stellen.
Samen werkten de wetenschappers aan een component die op maat was gemaakt met een configuratie en stijfheid om het spierweefsel op natuurlijke wijze te laten samentrekken en de veer maximaal te strekken. Het team ontwierp de configuratie en afmetingen van de component op basis van talloze berekeningen die ze hadden uitgevoerd om de natuurlijke krachten van een spier te relateren aan de stijfheid en de mate van beweging van een buiging.
Eigenschappen
De component die ze uiteindelijk hebben ontworpen is 1/100 van de stijfheid van het spierweefsel zelf. Het resultaat lijkt op een miniatuur accordeonachtige structuur. De hoeken zijn door een klein stripje vastgemaakt aan een onderliggende basis, die naast een aangrenzende stripje zit dat direct op de basis past. Ze wikkelden vervolgens een spierband rond de twee hoekstripjes (bestaande uit levende spiervezels die ze uit muizencellen lieten groeien). Ze maten vervolgens hoe dicht de stripjes naar elkaar toe werden getrokken toen de spierband samentrok.
De configuratie van de component ervoor zorgde dat de spierband grotendeels in de richting tussen de twee stripjes kon samentrekken. Door deze gerichte samentrekking kon de spier de stripjes veel dichter bij elkaar trekken – vijf keer dichter – vergeleken met eerdere spieractuatorontwerpen.
De nieuwe component is een soort skelet dat dat zacht en flexibel is in één richting en stijf in alle andere richtingen. Wanneer de spier samentrekt, wordt alle kracht omgezet in beweging in die richting. Het is een enorme versterking.
Toepassingen
Het team ontdekte dat ze het apparaat konden gebruiken om de spierprestaties en het uithoudingsvermogen nauwkeurig te meten. Toen ze de frequentie van de spiersamentrekkingen varieerden, merkten ze dat de spieren bij hogere frequenties 'vermoeid raakten' en niet zoveel trekkracht genereerden.
De onderzoekers zijn nu bezig met het aanpassen en combineren van componenten om nauwkeurige, gearticuleerde en betrouwbare robots te bouwen die worden aangedreven door natuurlijke spieren. Zo willen de onderzoekers in de toekomst proberen een chirurgische robot te bouwen die minimaal invasieve procedures in het lichaam kan uitvoeren. Technisch gezien kunnen spieren robots van elke omvang aandrijven, maar de onderzoekers denken vooral aan kleine robots. Biologische actuatoren blinken hier uit in termen van kracht, efficiëntie en aanpassingsvermogen.
Foto: Felice Frankel